
This is a difficult topic. I have to admit I am still not completely comfortable with all the concepts and functions.
However, the thinking is amazingly interesting, and I will take some time to ingest everything.
First things first, I will use this post to summarize what I have learned so far.
How did I end up reading that kind of work, you ask? Weeeellll, that’s easy 🙂
Brendan Burns, in one of Ignite ’17 sessions, used the comparison “autonomous vs autonomic” to discuss Kubernetes.
This got me thinking on the actual comparison, and aided with our trusted friend, Google, I found a NASA paper about that (https://www.researchgate.net/publication/265111077_Autonomous_and_Autonomic_Systems_with_Applications_to_NASA_Intelligent_Spacecraft_Operations_and_Exploration_Systems) I started to read it, but it was a bit obscure for me, and scientific English, applied to space research, was a bit too hard for an introduction to that topic of autonomic systems.
Some more research, helped by me beloved wife, led to a research thesis, in French, by Rémi Sharrock (https://www.linkedin.com/in/tichadok/). The thesis is available right there : https://tel.archives-ouvertes.fr/tel-00578735/document. This one relates to the same topic, but applied to distributed software and infrastructure, which ends up being way more familiar to me 🙂
The point where I am right now is just over getting the definitions and concepts right.
I will try to describe what I understand here about automated, autonomous and autonomic systems.
There is some progression from the first to the second, and from the second to the third concept.
Let’s start with automated. An automated system is just like an automaton in the old world : something that will execute a series of commands, on the order of a human (or another system). For example, you have a thermostat at home that send the temperature from inside and outside your home to the heater controller.
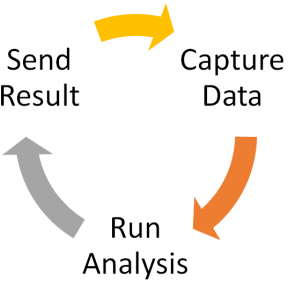
There is no brain in there, or almost none.
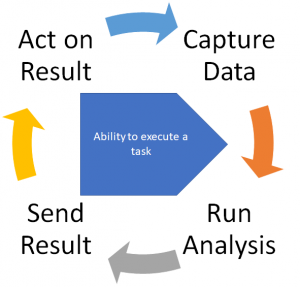
The higher step is an autonomous system. This one is able to take some decision and act on the data it captured. To continue with the thermostat example, you have a heater controller which will handle the current temperature, from both inside and outside, and decide whether to start heating the house, and how.
The short version is that the system is able to execute a task by itself.
And then we have an autonomic system. This is able to have a higher view of its environment, and should be able to control the fact that it will always be able to execute its tasks. I have run out of the heater example, but let’s take a smart mower. The first degree of autonomicity that it has is the way it will control its battery level, and return to its base station to recharge, in order to ensure that it will be able to continue its task, which is mowing the lawn.
There are multiple pillars of autonomicity. Rémi Sharrock described four in his thesis, and I tend to trust him on this :
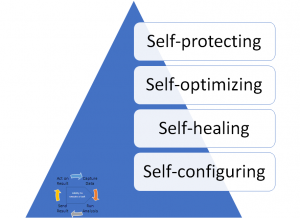
Each of these four pillars can be implemented into the system, to various degrees.
I am not yet comfortable enough on describing precisely the four pillars, but it will come in a future post!